 da
da de
de en
en es
es fr
fr it
it nb
nb nl
nl sv
sv fi
fiComo o Ethernet Automotivo contribui para o desenvolvimento de Controladores de Domínio
Houve um tempo em que cada unidade de controle no carro operava completamente de forma independente e, portanto, tinha seus próprios sensores e atuadores. Esses sensores e atuadores estavam diretamente conectados à unidade de controle. Simples e eficaz. No entanto, à medida que o número de sensores, atuadores e unidades de controle continuava a aumentar, os chicotes de cabos também aumentavam. Rapidamente, eram necessários quilômetros de cabos, e a visão geral estava longe de ser clara. Isso precisava ser melhorado.
E é por isso que, no início dos anos 90, a rede CAN foi introduzida. As unidades de controle puderam então trocar informações entre si, incluindo sinais dos sensores. Uma verdadeira revolução no mundo automotivo. Desde então, a arquitetura de rede dentro de um veículo tem evoluído constantemente. E com a chegada das tecnologias de trem de força elétrico e autônomo, no futuro próximo, certamente serão dados passos ainda maiores.

Mas isso também significa que muitas mudanças estão por vir na maneira como a eletrônica é implementada em um veículo. Resumindo, dentro de 10 anos, um controlador de domínio ou supercomputador estará encarregado de todas as funções em todo o trem de força. A ECU, como a conhecemos agora, terá um papel mais subordinado. E à medida que esses controladores de domínio e suas redes associadas continuam a se desenvolver, as unidades de controle individuais desaparecerão gradualmente (sim, incluindo a ECU), até que, no final, apenas um punhado de controladores de domínio ou supercomputadores tenham o controle.
Mas antes disso, queremos explicar um pouco mais sobre a rede que desempenhará um papel importante nisso. Apesar de o Ethernet Automotivo estar disponível há algum tempo, sua sofisticação está aumentando cada vez mais.
O início: uma gateway central
A indústria automobilística está constantemente em busca de mais velocidade de dados e mais possibilidades de comunicação. Já em 2004, durante o desenvolvimento da rede FlexRay, os fabricantes de automóveis perceberam que precisavam adotar uma nova abordagem em relação à comunicação entre as diferentes unidades de controle. O tamanho das atualizações de software estava ficando fora de controle e, com a velocidade do HS CAN então em uso, uma atualização levaria literalmente dezenas de horas. Impraticável para oficinas.
A solução veio em 2008 na forma de uma gateway central, que não só tinha a tarefa de trocar dados entre as diferentes redes existentes CAN, FlexRay e MOST (Transporte de Sistemas Orientados a Mídia), mas também servia como interface para o mundo exterior para diagnósticos e programação (atualizações de software etc.). A BMW foi a primeira a introduzir uma nova gateway central desse tipo.
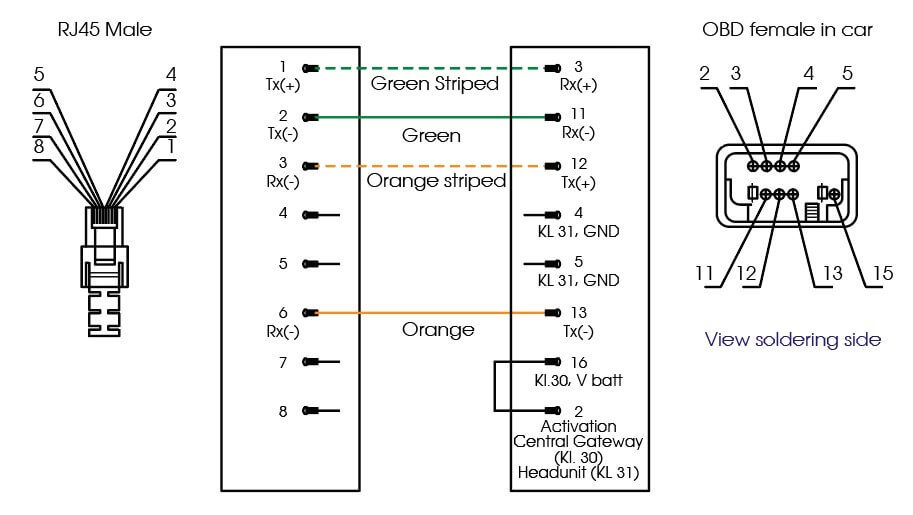
Os pinos 3, 11, 12 e 13 na porta OBDII são usados para se comunicar com o mundo exterior por meio de uma conexão Ethernet
Portanto, a porta OBDII não tinha mais apenas duas linhas CAN para permitir a comunicação com equipamentos de concessionárias, mas sim quatro linhas Ethernet, correspondendo exatamente ao conector RJ-45 que conhecemos tão bem das redes de computadores Ethernet. Portanto, os pinos 3, 11, 12 e 13 na porta OBDII são usados para se comunicar com o mundo exterior por meio de uma conexão Ethernet.
Padrão Ethernet para a indústria automobilística: 100BASE-T1
A tecnologia Ethernet já existia há algum tempo. Mas, devido aos rigorosos requisitos de chips e outros componentes eletrônicos, não havia aplicação para a indústria automobilística. Até 2004, o Ethernet nunca havia sido usado em veículos e, portanto, foi necessário desenvolver uma nova gama completa de chips, semicondutores e switches, especialmente para esse fim. E também o cabeamento era um desafio, pois, por várias razões, desejava-se alcançar 100 Mbps em um cabo de par único torcido não blindado (um cabo semelhante ao CAN e ao FlexRay). Isso levou ao desenvolvimento de um novo padrão Ethernet especialmente para a indústria automobilística: 100BASE-T1. Ele foi introduzido em 2013 e tinha uma taxa de dados de 50 Mbps. Em 2020, o 1000BASE-T1 foi introduzido, que pode fornecer uma taxa de dados de 1000 Mbps (1 Gbps). Atualmente, está sendo trabalhado para atingir velocidades de 50 Gbps.
Possibilidades para o futuro
Como o Ethernet está presente em todos os aspectos da vida cotidiana, as possibilidades são infinitas. A tecnologia de computador dos atuais PCs, laptops e tablets pode ser implementada em veículos com a chegada do Ethernet Automotivo. Isso significa que o poder de processamento gráfico para a direção autônoma não será mais um problema.
Para entender a transformação na arquitetura de rede, é necessário compreender como a comunicação é tratada nos veículos atuais (3ª geração). Na imagem abaixo, a gateway central é representada como o maior bloco roxo. Os blocos menores verdes são unidades de controle, cada uma em sua própria rede de comunicação: LIN, CAN ou FlexRay.
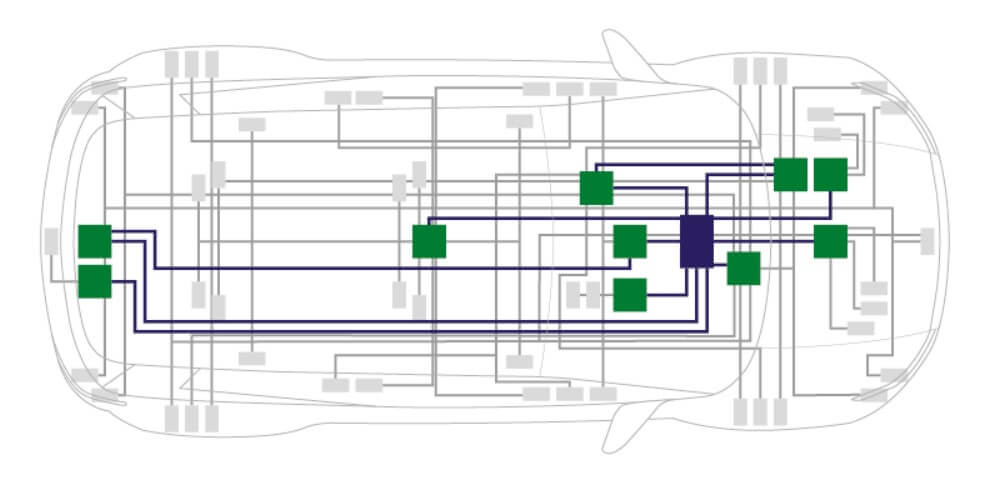
Arquitetura de rede de comunicação em veículos atuais (3ª geração)
No entanto, o número de unidades de controle está se tornando cada vez mais excessivo e, além disso, as unidades de controle atuais não serão capazes de lidar com suas tarefas no futuro próximo. Abaixo da gateway central, serão colocados controladores de domínio que também se comunicarão através do Ethernet (também representado em roxo). Um desses controladores de domínio se concentrará exclusivamente em todos os dados e funções relacionados à direção autônoma. Nesta rede de 4ª geração, unidades de controle e sub-redes ainda existirão, mas a rede terá a velocidade onde for necessária.
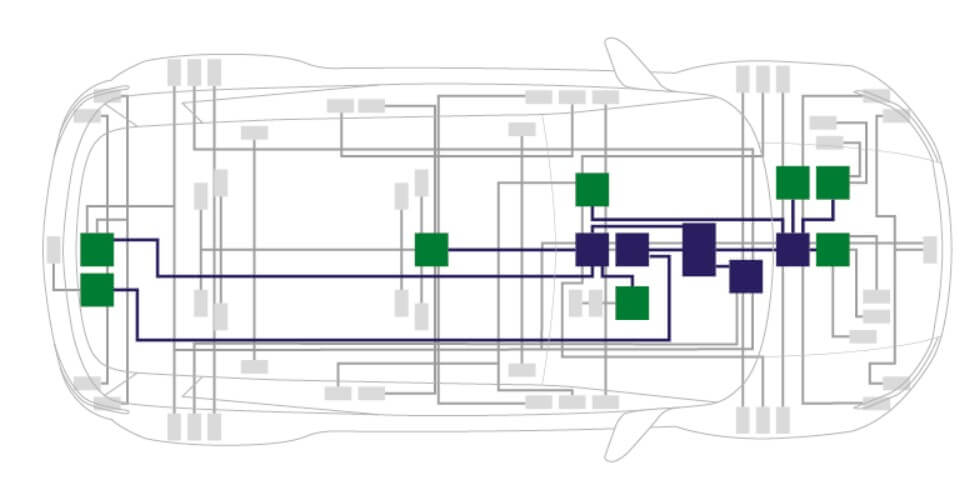
Arquitetura de rede de comunicação em veículos próximos (4ª geração) do futuro
É difícil prever como será exatamente uma rede de 5ª geração na prática, mas após a implementação de controladores de domínio, espera-se uma tendência clara: a estrutura se tornará significativamente menos complexa, por meio da redução em massa de componentes. A chegada de sensores e atuadores inteligentes tornará as unidades de controle totalmente dispensáveis. O que restará será uma rede leve, mas poderosa, de alguns controladores de domínio ou supercomputadores que, trabalhando em estreita colaboração, gerenciarão todos os sistemas no veículo."