 da
da de
de en
en es
es fr
fr it
it nb
nb nl
nl sv
sv fi
fiO sensor do ângulo de direcção e o sensor de aceleração: um guia completo
O sensor do ângulo de direcção é normalmente montado exactamente onde seria de esperar: atrás do volante, à volta da coluna de direcção. Ocasionalmente, um fabricante opta por colocar o sensor perto da cremalheira da direcção, mas isto é bastante raro. Há vários tipos em circulação. O tipo baseado no efeito Hall é o mais popular, mas as versões com contactos de arrasto também ainda ocorrem. Existem também sensores ópticos digitais que dão um sinal específico para o ângulo de rotação actualmente medido. Mencionaremos brevemente as diferenças entre eles.
Analógico com contacto deslizante
O sensor do ângulo de controlo analógico é composto por dois potenciómetros, também conhecidos como divisores de tensão. Estes divisores de tensão utilizam uma pista de resistência fixa, muitas vezes feita de carbono, através da qual corre a tensão. Um contacto de arrastamento móvel move-se ao longo desta pista de resistência e a posição em que o contacto está actualmente determina quanta tensão é transmitida. Há versões que funcionam com uma tensão de referência de 5 volts e as que utilizam 12 volts. A propósito, o segundo divisor de tensão não pretende ser um meio de controlo, mas determinar o sentido de rotação do volante: no sentido anti-horário ou no sentido horário. Ao colocar os divisores de tensão em sentidos opostos, a diferença de tensão entre eles pode determinar se o volante roda no sentido dos ponteiros do relógio ou no sentido contrário ao dos ponteiros do relógio. A saída de tensão na posição zero (quando o volante e as rodas são rectas) pode diferir para cada divisor de tensão. Isto é feito de propósito, para que se possa medir se o sensor do ângulo de direcção está a funcionar correctamente. Existem agora muitas variantes deste tipo de sensor de ângulo de direcção, pelo que infelizmente não podemos mencionar valores de medição específicos.
Acontece que os contactos de deslizamento se desgastam ao ponto de já não ser possível um contacto permanente. Por este motivo, os contactos deslizantes são cada vez menos utilizados na indústria automóvel. Assim, se um tal sensor de ângulo de direcção falhar ou ocasionalmente perder o sinal, verifique primeiro esses contactos de deslizamento.
Efeito Hall
Os sensores de ângulo de direcção que utilizam o efeito Hall (como o Bosch LWS5 e LWS6) funcionam sem contacto e, portanto, não sofrem de desgaste. Tal como os sensores activos das rodas, este sensor de ângulo de direcção utiliza um anel multipolar. Os sensores Hall (de facto, vários) detectam qualquer movimento com uma precisão de 1,5 graus e geram sinais de bloco em direcção à unidade de controlo. A fase do sinal de cada sensor Hall é diferente para que a direcção de rotação possa ser imediatamente determinada e se possa descartar que o sensor não esteja a funcionar correctamente. O que se segue é um cálculo do ângulo de direcção real, sentido de rotação e velocidade de rotação. O resultado é convertido num sinal CAN e enviado para a ESP-ECU imediatamente a seguir.
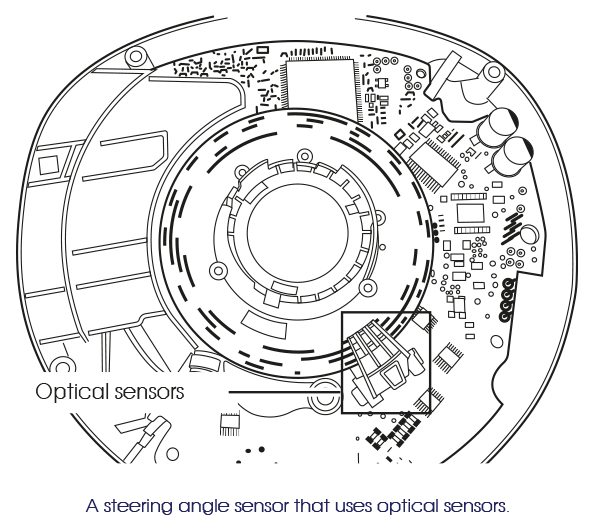
Óptica
Durante algum tempo, a Mercedes-Benz, em particular, foi uma grande ventoinha de sensores ópticos de ângulo de direcção. Este tipo de sensor também gera múltiplos sinais de bloco, mas em vez de magnetismo, utiliza agora a luz. Ao utilizar múltiplas pistas, cada uma com o seu próprio padrão de furo, são criados sinais diferentes. Estes sinais são comparados pelo controlador e o resultado é convertido num sinal digital utilizável.
No início, pensar-se-ia que este tipo de sensor funciona realmente tão bem como um sensor Hall, mas os sensores ópticos têm um grande inimigo: a contaminação. Mesmo um pouco de pó pode ser suficiente para bloquear o feixe de luz e assim interferir com o sinal. Os sensores ópticos só são, portanto, realmente adequados para um ambiente completamente selado.
Assim, quando os sensores ópticos não funcionam correctamente, verifique sempre primeiro a existência de poeira e outras contaminações. Soprar esta contaminação pode ser suficiente para resolver o mau funcionamento!
Calibração
Calibrar o sensor do ângulo de direcção é muito fácil, utilizando um bom equipamento de diagnóstico. Muitas vezes, uma volta completa para a esquerda e direita é suficiente para ensinar completamente o sensor. Os sensores de auto-aprendizagem também são conhecidos. Nestes, basta uma volta completa para a esquerda e para a direita com a ignição ligada. Em muitos casos, o sistema ESP pode também detectar por si só se a calibração é necessária, comparando os valores do sensor do ângulo de direcção com os dos vários sensores de aceleração. Se o sistema notar que o carro está continuamente a conduzir em linha recta, mas o ângulo de direcção ainda se desviar demasiado, o ESP desligar-se-á e a luz indicadora de avaria acender-se-á.
Direcção assistida eléctrica
O sensor do ângulo de direcção é utilizado não só para controlar o ESP, mas também para controlar a direcção assistida eléctrica. Um motor eléctrico energiza o movimento de direcção assim que é detectada uma alteração no ângulo de direcção. Isto torna redundante a assistência de potência hidráulica. A vantagem deste sistema reside não só em poupar espaço e peso, mas também nas possibilidades de ajuste da direcção. Isto pode criar uma sensação confortável ou desportiva, por exemplo. Também pode ser muito útil ao estacionar, pense, por exemplo, no botão 'CITY' da Fiat que faz com que a direcção fique extremamente leve. Uma desvantagem da direcção assistida eléctrica, contudo, é a falta de sensação: porque o motor eléctrico determina o movimento, as reacções das rodas à superfície da estrada são pouco perceptíveis, transmitidas ao volante.
BMW série 3 E90: breves mensagens de erro DSC
Suponha-se: ocasionalmente uma mensagem DSC aparece brevemente no painel, mas desaparece tão subitamente como veio. A leitura não funciona, uma vez que o erro não é armazenado. No entanto, a mensagem volta de vez em quando. O que é que se faz então? A única opção que tem então é verificar tudo o que possa causar avarias intermitentes. Uma dica que podemos transmitir no caso do BMW série 3 E90: verificar o sensor do ângulo de direcção. Há vários casos em que o sensor de ângulo de direcção foi tão mal desgastado que causou avarias. Não sabemos porque é que isto ocorre tão especificamente no E90.
Sensor de aceleração
Para além do ângulo de direcção, a 'ESP-ECU' também precisa de valores reais que digam que movimento o veículo está a fazer. Os sensores de aceleração são utilizados para este fim. Estes sensores podem ser divididos em duas variantes: os sensores de aceleração lateral e os sensores de ângulo de guinada. No entanto, na prática, quase nunca encontrará estes sensores separadamente: de facto, tanto a Continental como a Bosch construíram estes sensores numa única caixa. Utilizaremos o sensor do ligeiramente mais antigo Bosch 5.7 ESP como exemplo para explicar como funciona.
Dica: Calibração de sensores ESP
Importante para sistemas com ESP: após a montagem, todos os sensores ESP devem ser sempre recalibrados. O melhor equipamento de diagnóstico universal também tem esta função. Se isto não for feito, é garantida a ocorrência de falhas.
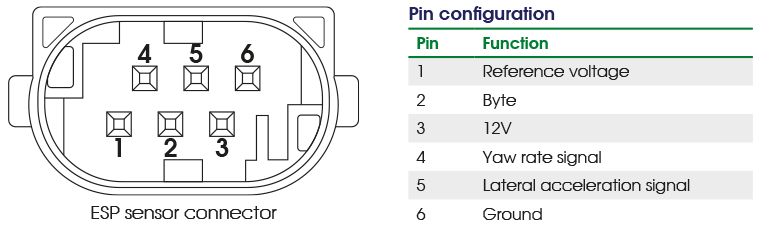
O sensor ESP utiliza uma fonte de alimentação (12V), terra e um bite (bloco de sinal , 0 - 6.8V). O bite é utilizado como meio de controlo e enviada de volta juntamente com o sinal de saída do sensor de ângulo de guinada. Além disso, o sensor de ângulo de guinada também usa uma tensão de referência (2,5V). O sensor de ângulo de guinada influenciará esta voltagem de referência quer positiva quer negativamente: positiva num ângulo de guinada positivo, negativa num ângulo de guinada negativo. Como resultado, a saída varia de 0,7V a 4,3V. Como o bite de controlo afecta este sinal, o sinal de saída deve ser parecido com o seguinte:
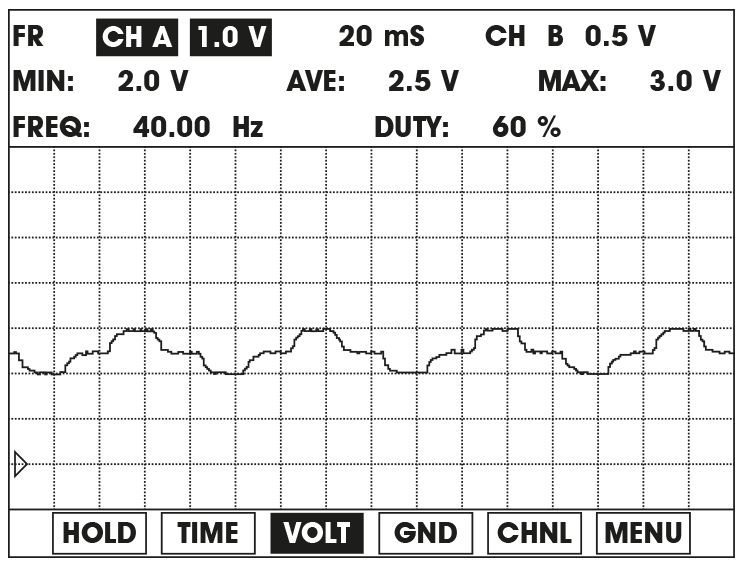
CUIDADO: Se o sinal for linear, o sensor está, portanto, defeituoso!
O sensor de aceleração lateral não utiliza a tensão de referência e o bite de controlo. O sinal de saída é rectilíneo e varia de 0,5V a 4,5V. Para atingir estes valores, uma força gravitacional de -1,5G ou +3,5G terá de ser atingida.
Evolução
Embora a história anterior dê uma grande visão de como funcionam os sensores ESP, muita coisa mudou entretanto. Tal como o resto da electrónica nos veículos, o ESP passou lentamente dos sinais analógicos para as mensagens CAN. Afinal de contas, uma rede central oferece muitas vantagens. Para mencionar dois exemplos: o sinal está disponível em todo o veículo e são feitas enormes economias na cablagem. Isto poupa espaço e peso.
A tecnologia nos próprios sensores também melhorou. Se compararmos o Bosch 5.7 ESP e o Bosch 8.0 ESP, vemos claras diferenças. Tanto o sensor lateral como o sensor de ângulo de guinada utilizam agora material piezoeléctrico que emite uma tensão crescente à medida que a força de aceleração aumenta.
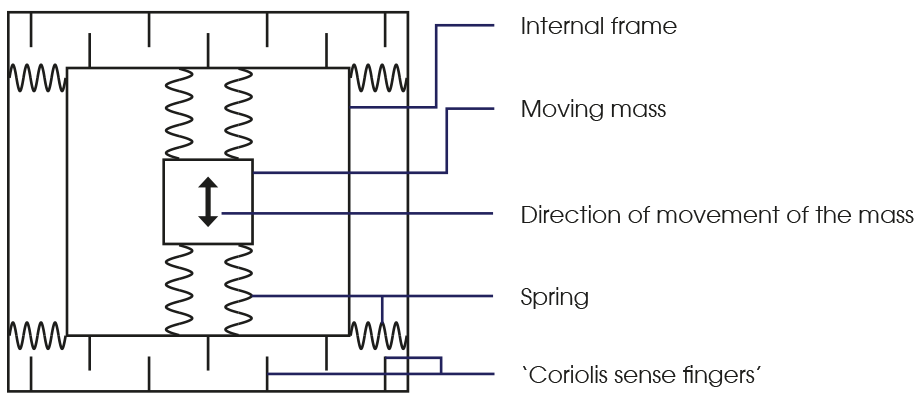
Uma massa suspensa é colocada no centro do material piezoeléctrico. Assim que o carro acelera ou vira numa determinada direcção, o mesmo acontece com a massa. A força necessária para retirar esta massa da sua posição de repouso gera uma certa voltagem no material piezoeléctrico. É provavelmente supérfluo explicar que esta voltagem aumenta quanto mais a massa é deslocada para fora da sua posição de repouso.
Esta voltagem, por sua vez, é convertida num sinal eléctrico. Ao libertar um cálculo sobre os valores da aceleração lateral e da aceleração de viragem, isto também pode ser utilizado para comparar o movimento do carro com o ângulo de direcção.
Um facto engraçado:
O sensor de ângulo de guinada da nova geração é também chamado iMEMS: Sistema Micro Electromecânico integrado. Esta tecnologia tornou o sensor de ângulo de guinada tão pequeno que a integração na ECU já não é um problema. As ECUs modernas de ABS, tais como certos tipos de ABS ATE MK60E, já não necessitam, portanto, de sensores ESP externos.
Portanto, considere isto cuidadosamente em caso de falhas relacionadas com ESP: a falha pode também estar dentro da ECU nos dias de hoje.
Código de erro 01423 - Sensor de taxa de Yaw
Em caso de ajuste / adaptação de base incorrecta: executar novamente o ajuste de base. Em caso de falha do circuito eléctrico: verificar a cablagem até ao sensor de taxa de guinada (G200) e verificar a tensão de alimentação do sensor. Está tudo bem? Então substitua o sensor. Se o código de erro ainda se mantiver, por favor contacte o nosso Serviço de Apoio ao Cliente.
Direcção Activa
Os automóveis equipados com direcção activa, tais como BMW e Mercedes-Benz, têm dois sensores ESP: um sensor principal debaixo do banco do condutor e um sensor secundário debaixo do banco do passageiro. O sensor secundário é em grande parte o mesmo que o sensor principal, mas tem uma resistência terminal (o sensor principal não tem) e também utiliza um CAN-ID diferente. Assim, não se pode trocar os sensores. A forma como ambos os sensores são utilizados pelo sistema ESP é bastante diferente. Os valores do segundo sensor são utilizados apenas como um meio de controlar os valores do sensor principal. Portanto, o segundo sensor não pode assumir a função do sensor principal. Assim que é medida uma diferença entre os dois sensores, o sistema entra em falha. A propósito, ambos os sensores funcionam passivamente: um sinal é enviado apenas quando o sistema ESP ECU o solicita. Felizmente, tal como mencionado anteriormente, isto acontece a cada 10 milissegundos.